BLDC
ДВИГУНИ

01. BLDC двигуни: основа точних і стабілізаційних систем
BLDC-двигуни (Brushless DC, безщіткові електродвигуни) — це сучасний клас електродвигунів, у яких відсутній механічний колектор і щітки. Керування обертанням у таких двигунах здійснюється електронікою, а не механічним контактом.
Саме ця особливість зробила BLDC-двигуни базовим рішенням для систем, де критично важливі:
- точність позиціонування
- стабільність руху
- довговічність
- гнучке керування динамікою
# Чому BLDC двигуни виграють у точності
Ключова перевага BLDC-двигунів полягає в тому, що їх точність визначається системою зворотного зв’язку, перш за все — енкодером.
Точність не обмежена механічним кроком, а задається роздільною здатністю енкодера і алгоритмами керування.
Це дозволяє:
- плавний безперервний рух
- мікрокорекцію положення
- стабільну роботу при змінному навантаженні
# BLDC і системи стабілізаці
У системах стабілізації критично важливо швидко реагувати на відхилення і утримувати положення з високою точністю.
BLDC-двигуни у поєднанні з енкодерами та контролерами (PID, FOC) дозволяють будувати замкнуті контури керування з постійною компенсацією помилок.
Порівняння з іншими типами двигунів:
- Колекторні двигуни:
Мають механічні щітки та колектор, що призводить до зносу, іскріння та обмеженого ресурсу. - Крокові двигуни:
Мають фіксований крок позиціонування, дискретний рух і обмежену точність без зворотного зв’язку. - Сервоприводи:
Сервопривід — це система, яка найчастіше базується саме на BLDC-двигуні разом з енкодером і контролером.
# Висновок
BLDC-двигуни — це оптимальне рішення для систем, де потрібні висока точність, стабільність і складне керування.
02. Розрахунок і виготовлення BLDC двигунів під індивідуальні задачі
У багатьох проєктах використання серійних BLDC-двигунів є достатнім рішенням. Проте існує цілий клас задач, у яких стандартні двигуни не дозволяють досягти необхідних характеристик або не можуть бути інтегровані в конструкцію через обмеження по формі, вазі чи геометрії.
У таких випадках оптимальним шляхом є розробка власного BLDC-двигуна під конкретний форм-фактор і технічні вимоги.
# Коли необхідна розробка власного BLDC двигуна
Індивідуальна розробка доцільна у випадках, коли:
- існують жорсткі обмеження по габаритах або масі
- двигун має нестандартну форму або пропорції
- потрібне специфічне співвідношення моменту і швидкості
- двигун є частиною інтегрованої конструкції, а не окремим модулем
- серійні рішення не забезпечують потрібної динаміки або стабільності
Типовим прикладом є задачі стабілізації, прецизійні приводи, а також компактні або пласкі механізми.
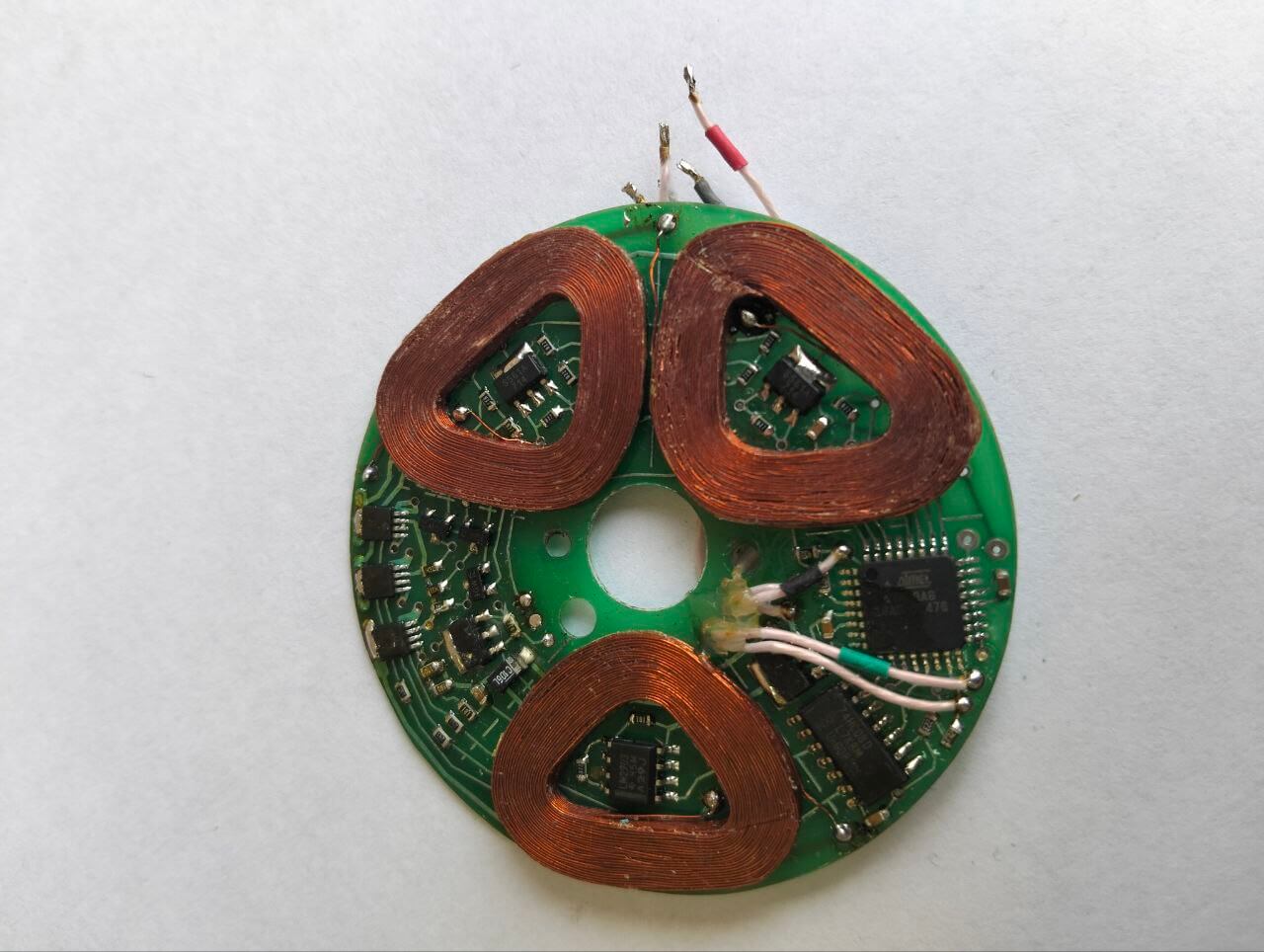
# Нестандартні форм-фактори
Один із поширених випадків індивідуальної розробки — це вимога до нетипового форм-фактора.
Наприклад, у нашій практиці був проєкт, де замовнику був необхідний BLDC-двигун з:
- мінімальною товщиною
- великим радіусом
- рівномірним розподілом моменту по колу
Такий двигун фізично неможливо було підібрати з серійних рішень, оскільки стандартні лінійки орієнтовані на класичні циліндричні формати. У цьому випадку була виконана повна розробка власного двигуна з урахуванням конструкції виробу.
# Що включає розрахунок BLDC двигуна
Розрахунок BLDC-двигуна — це комплексний інженерний процес, який включає:
- електромагнітний розрахунок статора і ротора
- вибір топології обмоток
- підбір магнітних матеріалів
- розрахунок моменту, швидкості та ККД
- тепловий розрахунок і відведення тепла
- механічний розрахунок корпусу та валу
- підбір і інтеграцію енкодера
Усі ці параметри розглядаються не ізольовано, а як єдина система, оптимізована під конкретну задачу.
# Виготовлення і прототипування
Після етапу розрахунків виконується:
- виготовлення прототипів
- складання і балансування
- електричні та теплові випробування
- перевірка характеристик у реальних режимах роботи
Це дозволяє підтвердити розрахункові параметри та за необхідності внести коригування ще до серійного виробництва.
# Чому індивідуальні BLDC двигуни — це перевага
Власний BLDC-двигун дозволяє:
- точно вписати привід у конструкцію виробу
- зменшити масу і габарити системи
- підвищити ефективність і стабільність
- отримати контроль над усією системою керування
Особливо це критично у високоточних, стабілізаційних та інженерно складних системах.
# Інженерна розробка в Україні
Наша команда має інженерів, які здатні виконувати повний цикл:
- від технічного аналізу задачі
- до розрахунку, виготовлення і тестування BLDC-двигунів
Розробка виконується в Україні з повним інженерним супроводом і фокусом на якість, повторюваність і практичну придатність рішень.
03. Керування BLDC двигунами та програмне забезпечення
BLDC-двигун — це не лише електромеханічний вузол, а повноцінна керована система. На відміну від простих електродвигунів, BLDC потребує складного алгоритмічного керування, яке безпосередньо впливає на точність, динаміку, ефективність і стабільність роботи.
Саме система керування визначає, як двигун поводиться під навантаженням, як швидко він реагує на команди і наскільки точно утримує положення.
# Чому керування BLDC є складним
У BLDC-двигунах відсутня механічна комутація — її повністю замінює електроніка.
Це означає, що:
- положення ротора визначається датчиками або алгоритмами оцінки
- комутація фаз виконується програмно
- момент, швидкість і положення формуються алгоритмами керування
Фактично, без правильно реалізованого програмного забезпечення BLDC-двигун не може працювати коректно.
# Основні типи керування BLDC двигунами
Існує декілька підходів до керування BLDC-двигунами, які застосовуються залежно від задачі.
- Шестиступенева комутація (Six-Step)
Базовий метод керування, що забезпечує просту реалізацію, але має обмежену плавність і точність. - Синусоїдальне керування
Покращує плавність обертання за рахунок синусоїдального формування струмів у фазах. - Векторне керування (FOC — Field Oriented Control)
Найбільш точний і технологічний підхід до керування BLDC-дввигунами.
FOC дозволяє незалежно керувати моментом і магнітним потоком, забезпечуючи:- максимальну плавність руху
- високий ККД
- точне керування моментом
- стабільну роботу на низьких швидкостях
Саме векторне керування використовується у стабілізаційних, сервоприводних і прецизійних системах.
# Програмне забезпечення для керування BLDC
Ми розробляємо програмне забезпечення для керування BLDC-двигунами як частину повної інженерної системи.
Це включає:
- реалізацію алгоритмів керування (FOC, PID, torque control)
- роботу з датчиками положення та швидкості
- оптимізацію під конкретний двигун і форм-фактор
- адаптацію під вимоги системи стабілізації або приводу
- інтеграцію з вищими рівнями керування
Програмне керування розглядається не ізольовано, а разом з електромеханічною частиною двигуна, що дозволяє досягати максимальної ефективності.
# Висновок
Ефективна робота BLDC-двигуна неможлива без правильно побудованої системи керування. Саме поєднання індивідуально розробленого двигуна та програмного забезпечення дозволяє створювати високоточні, стабільні та керовані системи.
04. Драйвери та електроніка
BLDC-двигун не може працювати без спеціалізованої силової та керуючої електроніки. Саме драйвер BLDC визначає, як двигун запускається, як формується момент, як він реагує на навантаження та наскільки стабільно працює у всьому діапазоні режимів.
Ми розробляємо електроніку для керування BLDC-двигунами як окремий інженерний напрям, тісно інтегрований з механікою та програмним забезпеченням.
# Роль драйвера в системі BLDC
Драйвер BLDC — це не просто силовий модуль. Це комплексна електронна система, яка:
- комутує фази двигуна
- керує струмами і напругою
- забезпечує захист двигуна і електроніки
- взаємодіє з датчиками положення
- реалізує алгоритми керування
Якість драйвера безпосередньо впливає на точність, ККД, тепловий режим і ресурс двигуна.
# Типова структура BLDC-драйвера
Електроніка керування BLDC-двигуном зазвичай включає:
- силову частину (MOSFET / IGBT, драйвери ключів)
- мікроконтролер або DSP
- вимірювання струмів і напруги
- інтерфейси для датчиків Холла або енкодерів
- схеми захисту (перевантаження, перенапруга, перегрів)
- комунікаційні інтерфейси
Усі ці вузли проєктуються як єдина система під конкретний двигун і задачу.
# Різні BLDC — різні драйвери
Не існує універсального драйвера, який однаково добре підходить для всіх BLDC-двигунів.
Драйвер завжди залежить від:
- потужності двигуна
- робочої напруги
- типу керування (Six-Step, синусоїдальне, FOC)
- наявності або відсутності датчиків
- вимог до точності та стабільності
- умов експлуатації
Саме тому у складних або нестандартних проєктах доцільно розробляти власну електроніку.
# Розробка електроніки під конкретний двигун
Ми розробляємо драйвери BLDC-двигунів під індивідуальні технічні вимоги.
Це включає:
- вибір архітектури силової частини
- підбір компонентної бази
- проєктування друкованих плат
- розрахунок теплових режимів
- реалізацію схем захисту
- інтеграцію з програмним забезпеченням керування
Електроніка проєктується з урахуванням реальних режимів роботи, а не лише номінальних параметрів.
# Інтеграція з програмним керуванням
Драйвер і програмне забезпечення розглядаються як єдине ціле. Алгоритми керування, вимірювання і захисти реалізуються з урахуванням особливостей конкретного двигуна.
Це включає:
- досягати стабільної роботи
- уникати резонансів і перегріву
- забезпечувати повторюваність характеристик
- масштабувати рішення
З виробництва
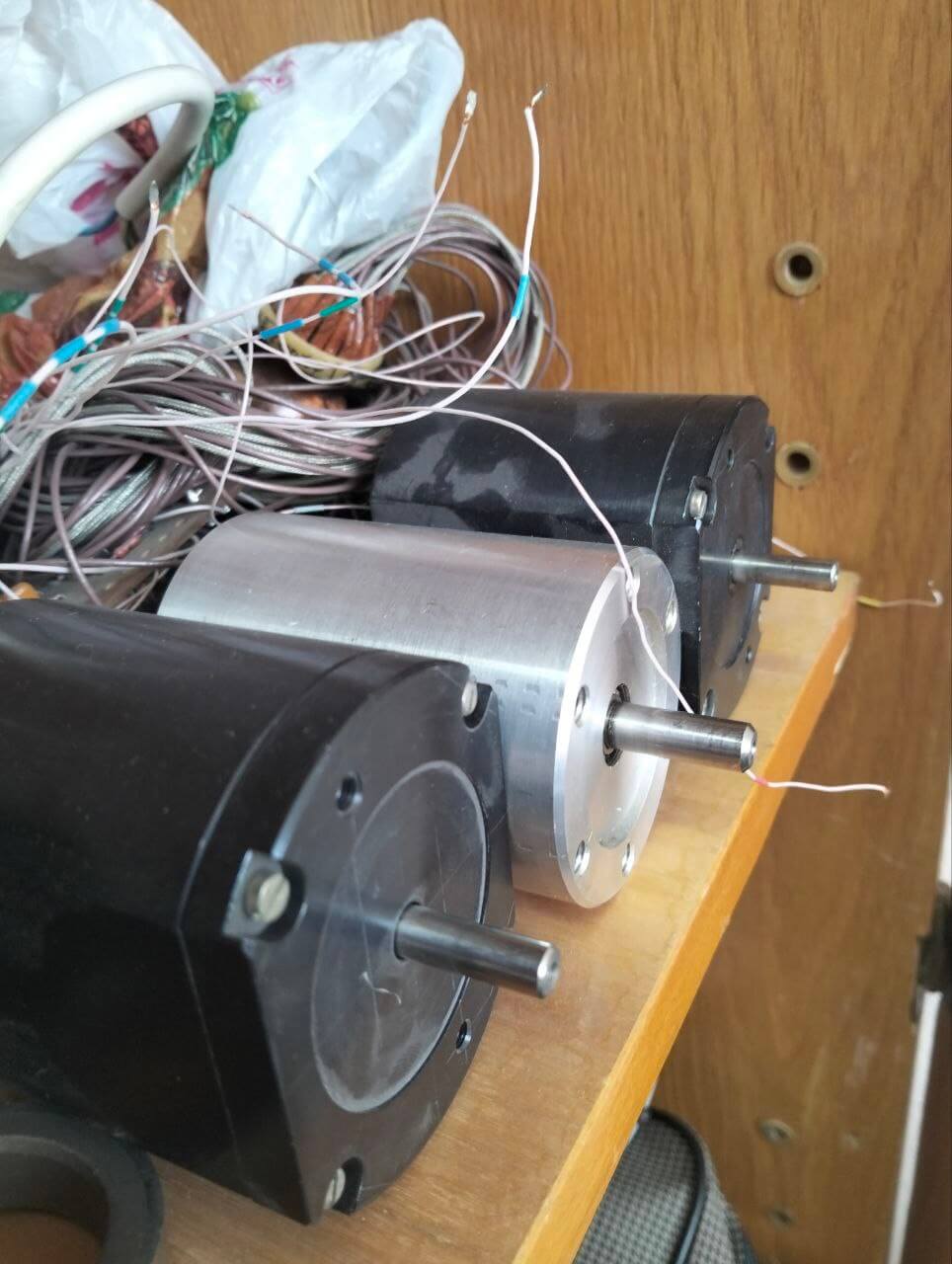
Галерея виробництва
Реальні зразки двигунів з нашого виробництва — від прототипів до готових виробів. Фотографії демонструють інженерну точність і якість виготовлення.


Маховик інерційний (Reaction Wheel) — власна розробка для систем орієнтування малих космічних апаратів.
# Виробництво і прототипування